Beta Lepton
#Einleitung
- Gehäuse
Ist eine low budget IP Kamera, die hat selbst schon Motoren dabei. - Motor Controller
3x A4988 Module - Mcu Board
ein STM32F103 Board - OPZ
Orange Pi Zero mini PC mit 256 oder 512 mb Ram
Die Beta Variante sollte aus möglichst günstigen Komponenten bestehen, ein Wärmebild aber auch ein Visuelles Bild liefern und über ein Webpanel steuerbar sein.
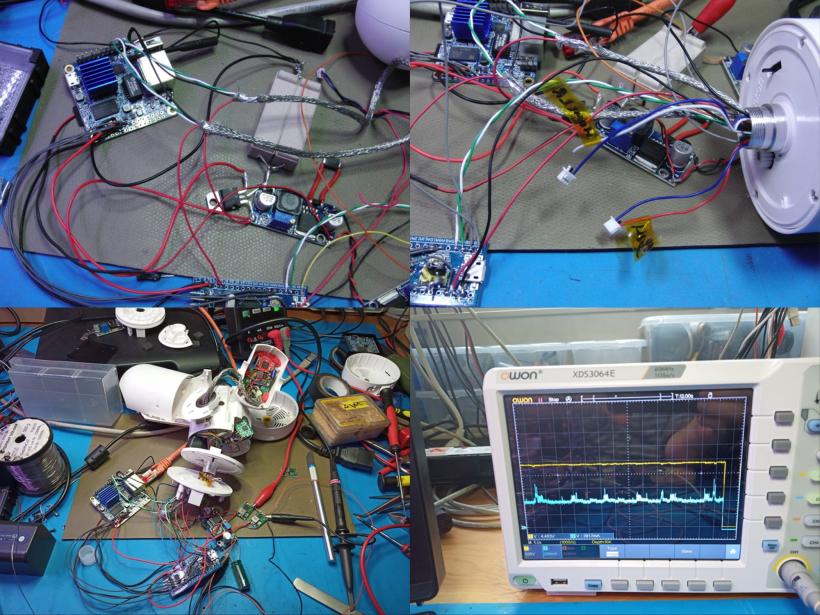
#LED und Power Test

Ich verwende einen Ring aus 8 Neopixel LEDs.
Hier wurde ein Belastungstest gemacht, mit beiden Kameras aber noch ohne Motoren.
Ich wollte mal sehen, wob die LEDs zur Beleuchtung taugen und wie es so um die Erwärmung der Komponenten steht.
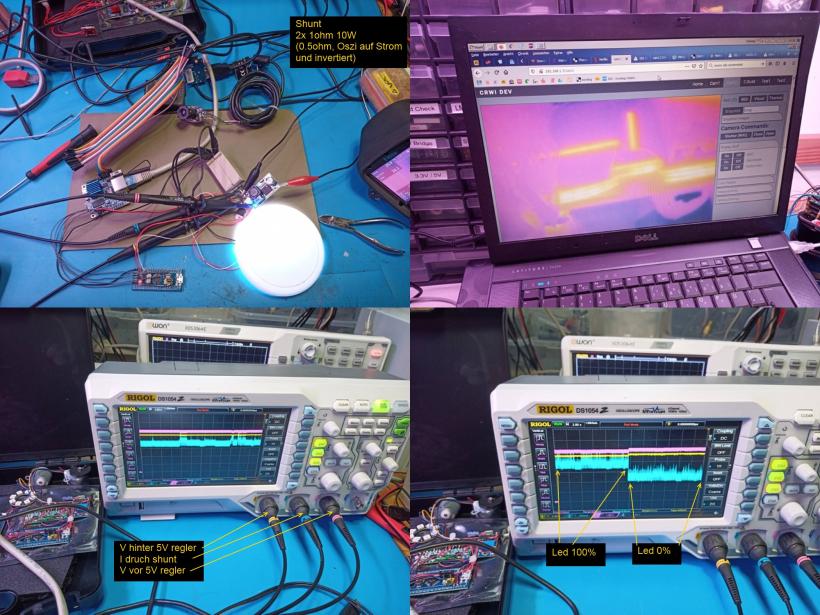
Die Komplette Schaltung war ein paar Tage im Betrieb um Optimierungen vor zu nehmen.
So wurden zum Beispiel extra Dioden am DcDc-Wandler angebracht, um durch Lastverteilung die Erwärmung zu reduzieren.
#Schaltung
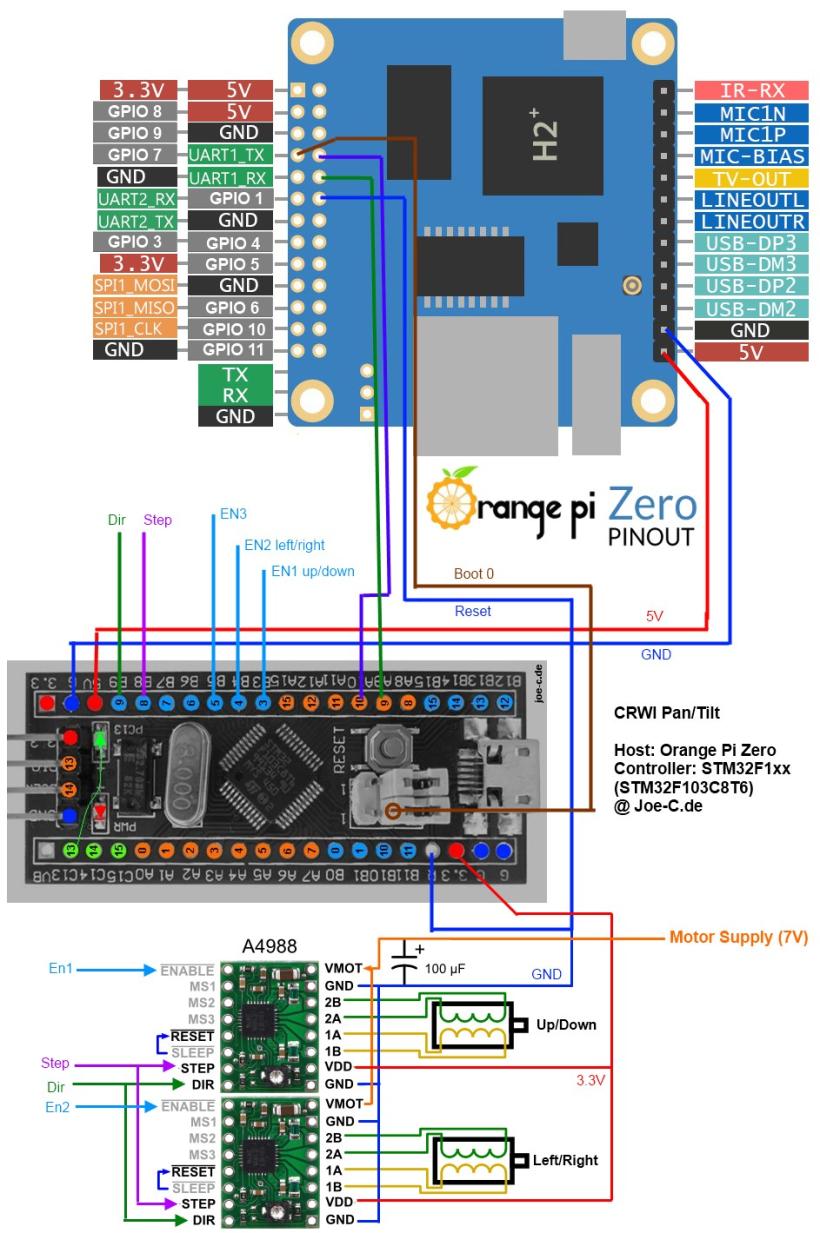
Dieses Bild zeigt alle Platinen, außer LED und die Kameras.
Der OPZ benutzt jetzt nur noch ein paar Digitale Outputs und die UART Schnittstelle.
Der Grundgedanke ist, vom OPZ aus einfach nur Befehle zu schicken und das Mikrocontroller Board alle Low-Level Steuerungen machen zu lassen.
Das STM32F103 Board ist so beschaltet, das man vom OPZ aus einen reset und sogar eine Firmware drauf flashen lassen kann. Ich brauche dafür nur eine neue Binary über die Weboberflache hochladen und ein paar Klicks später wird über UART eine neue Firmware drauf geladen.
Viele Funktionen wie LED Steuerung und auch ein paar Motorsteuerungen sind integriert. Damit kann man sowohl absolut als auch relativ die Motoren bewegen.
Für Beta war es noch eine eigene Firmware die eine Spezialversion vom Interfaceboard war.
#Motorsteuerung
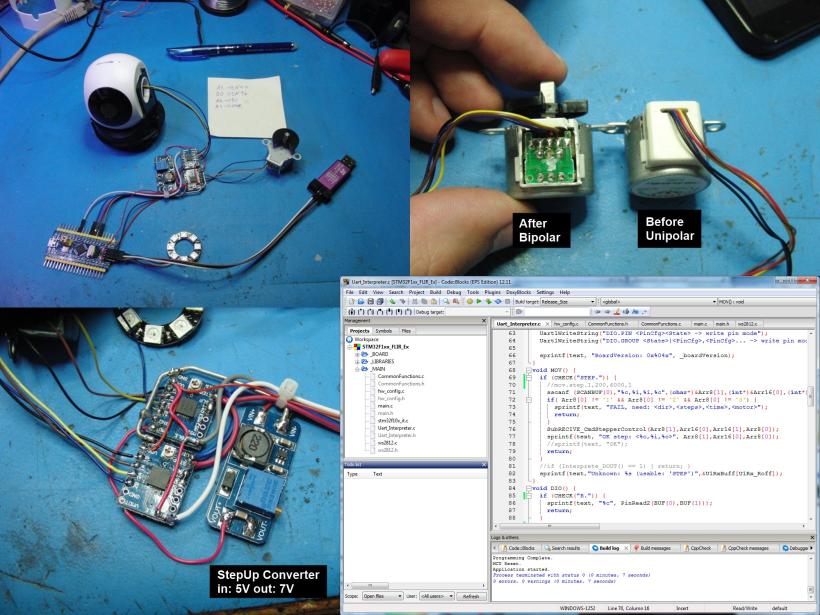
Die Motoren aus der Kamera konnten nicht direkt verwendet werden, da sie Unipolar ausgelegt waren. Das lässt sich aber durch das auftrennen einer Leitung auf dem Anschlussboard des Motors beheben.
Der A4988 Motor Treiber den ich benutze, ist auf bipolare Motoren ausgelegt. Vorteil am Treiber ist, das man nicht selbst die Schaltsequenz durchgehen muss, sondern nur 2 einfache digitale Pins hat.
dir (direction = Richtung) und
step (step = Schritt).
Damit könnte man den Motor sogar mit 2 Tastern direkt bedienen.
- Bipolar
4 aktive Leitungen. Beide Spulenpaare werden aufeinanderfolgend und mit wechselnder Polarität angesteuert. - Unipolar
5 aktive Leitungen. Ein Pin geht an die Versorgung, die anderen 4 an Schalttransistoren. Hier braucht man 4 digitale Pins und schaltet die der Reihe nach durch.
Bei den Unipolaren Motoren, braucht man pro Motor jeweils 4 weitere Steuerleitungen.
Mit dem Motor Treibern hingegen, lassen sich auch Signale kombinieren. So ist es zum Beispiel nicht zwingend notwendig, die dir und step Leitungen getrennt zu halten.
Zusätzlich gibt es enable Eingänge, damit kann man genau den Motor aktivieren, den man bewegen will, alle anderen bekommen zwar die Signale, aber ohne enable passiert nix.
#Motion Steuerung
Hier die fertig optimierte Schaltung mit allen elektrischen Komponenten.
Im Gegensatz zur Alpha Version, sind hier auch die Endschalter über den Mikrocontroller mit abgefragt. Es wurden auch absolute Positionen implementiert, man kann die Motoren mit einer "homeing" Funktion ausrichten und dann feste Stellpositionen anfahren.
Es ist eine recht einfache Funktion:
- fahre in Richtung des Endschalters und zähle die Schritte
- wenn angekommen (digital pin schaltet um) dann wieder so viele schritte zurück fahren, wie zuvor gezählt wurden
Auf diese Weise sind absolute Positionen bekannt, auch wenn die Position nach dem Einschalten unbekannt war. Es dauert nur ein paar Sekunden, erlaubt danach aber feste Blickrichtungen anzufahren.

Der OPZ ist so eingerichtet, dass er auch über USB sich als Netzwerkkarte anmeldet.
Daher kann man mit diesem Testaubau einfach an einen USB Port (mit genügend Spannungsstabilität) die Webseite testen und weiterentwickeln.
Die Motoren werden über einen StepUp DcDc-Wandler betrieben. Das ist alles recht Grenzwertig und man darf, wenn man die Spannung für die Motoren abgeschaltet hat, sie im Betrieb nicht wieder einschalten, weil der darauf folgende Spannungseinbruch den OPZ abstürzen lässt.
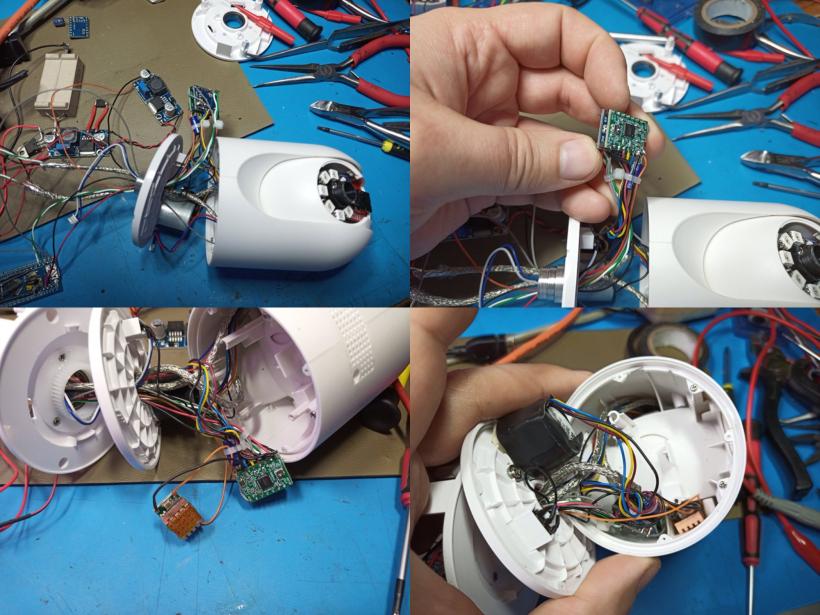
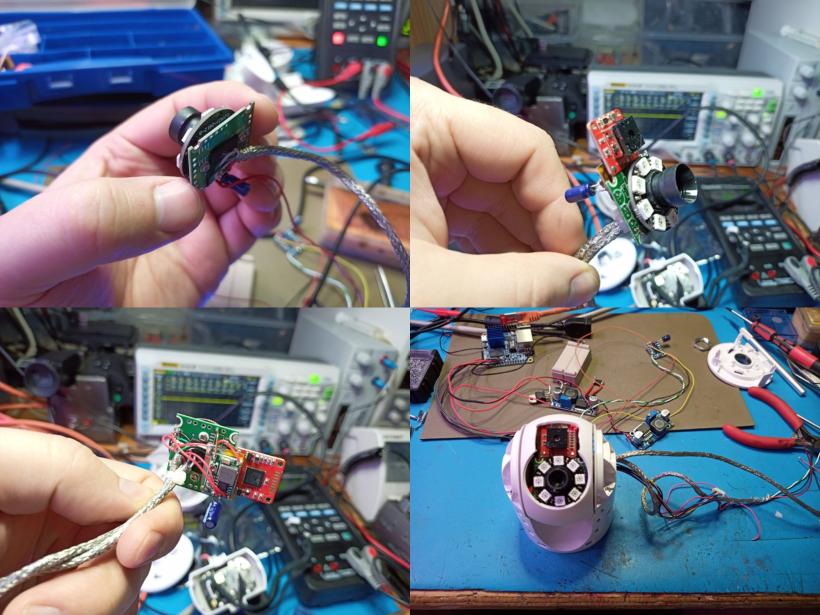
#Dual Kamera
#Testkoffer
Die visuelle Kamera ist eine billige, standard VGA Webcam. Ist für das kleine Board gut genug.
Für die Beleuchtung ist der RGB Ring um die visuelle Kamera angebracht. Die LEDs haben ihren eigenen DcDc-Wandler, damit ein umschalten von 0% zu 100% Beleuchtung keine Einbrüche auf der 5V Versorgung macht.
Der Lepton Sensor ist mit einem "PureThermal" board verbunden und wird einfach über USB an den OPZ angeschlossen.
Hier sind beide Kameras bereits eingebaut. Jetzt fehlen nur noch die Motorcontroller und deren Versorgung (wieder ein eigener DcDc-Wandler) im Kamerafuß.
#Test nach Zusammenbau
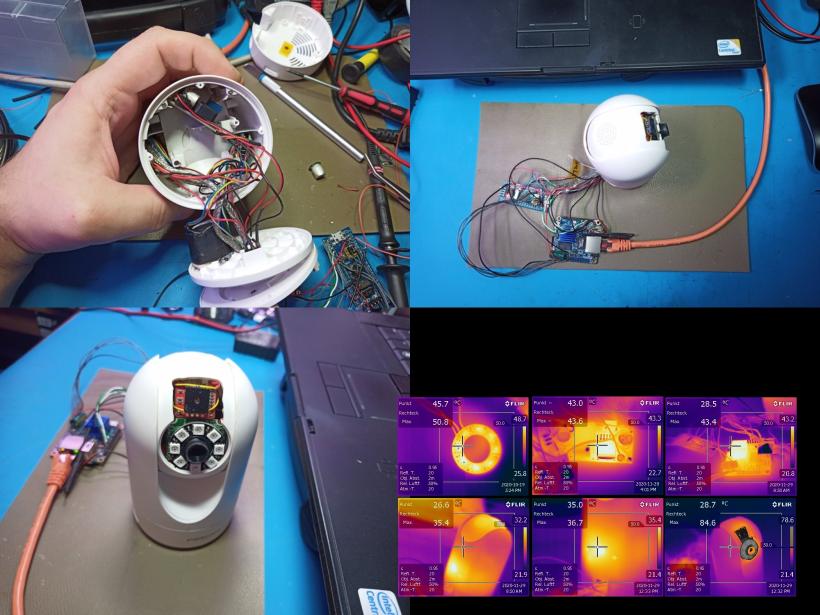
Der Platz im Fuß reicht nicht für den OPZ oder den DcDc-Wandler für den OPZ, daher läuft es wohl darauf hinaus, einen größeren Kamerafuß zu entwerfen, der für beides Platz hat.
Betrieben wird das ganze über POE mit 12 oder 15 Volt, je nachdem, wo ich es gerade betreibe und was da gerade so rumliegt.
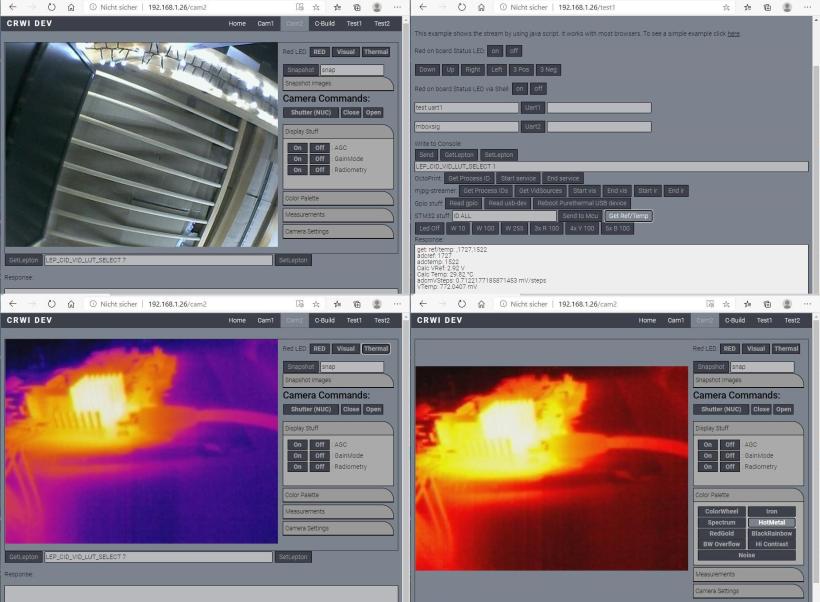
#Test Video

Bei diesem Video sieht man das ganze im Einsatz. Hier wird die Anzeige der Beiden Kamerabilder und die Steuerungsmöglichkeiten gezeigt. Man kann das Gerät auch gleichzeigt von verschiedenen Browsern aus steuern.
In diesem Zustand war die Kamera ein paar Wochen im Betrieb, bis leider die Visuelle Kamera ausgefallen ist, offenbar hat die den Dauerbetrieb nicht mit gemacht.